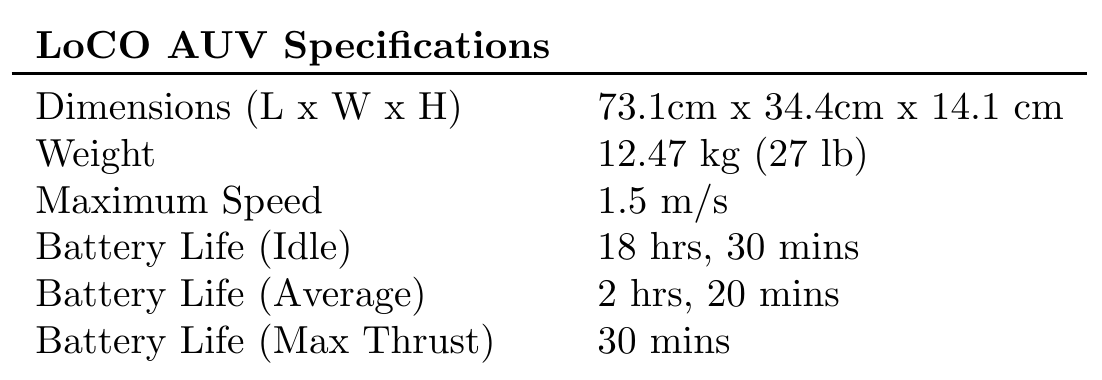
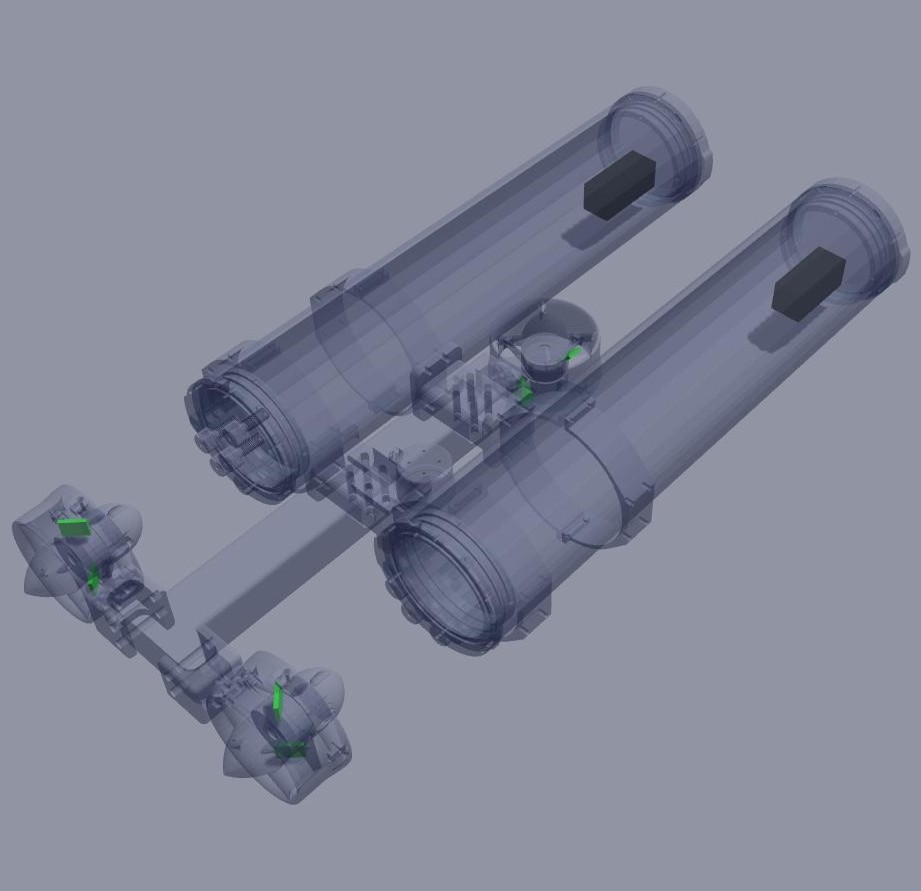
The LoCO Project is creating a Low-Cost, Open-Source, Autonomous Underwater Vehicle (AUV), designed to be general-purpose, single-person-deployable, and vision-guided, with a rated dive depth of up to 100 meters. LoCO is built from ~$4,000 worth of components, largely off-the-shelf and 3D printed. The software and hardware design of the LoCO AUV is built on open platforms, with a focus on modularity and expandability. A Gazebo-based simulator is also in the works. LoCO comes equipped with human-interaction capabilities, i.e., gestural control, diver following, and robot communication via motion, a product of prior (and current) research of the IRVLab.
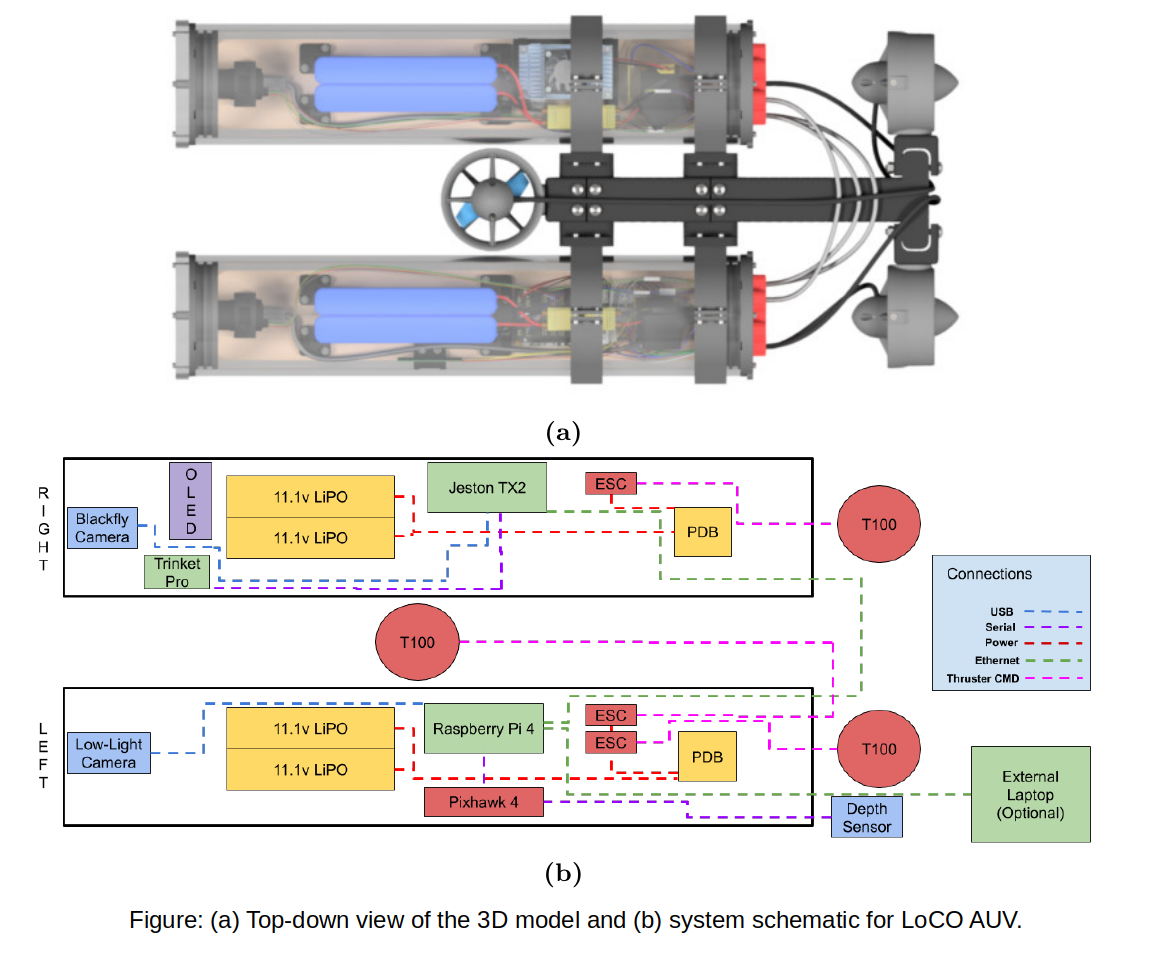
LoCO is designed to be an all-purpose AUV, adaptable to a variety of missions. The standard configuration is a dual-camera, vision-guided AUV with three thrusters.
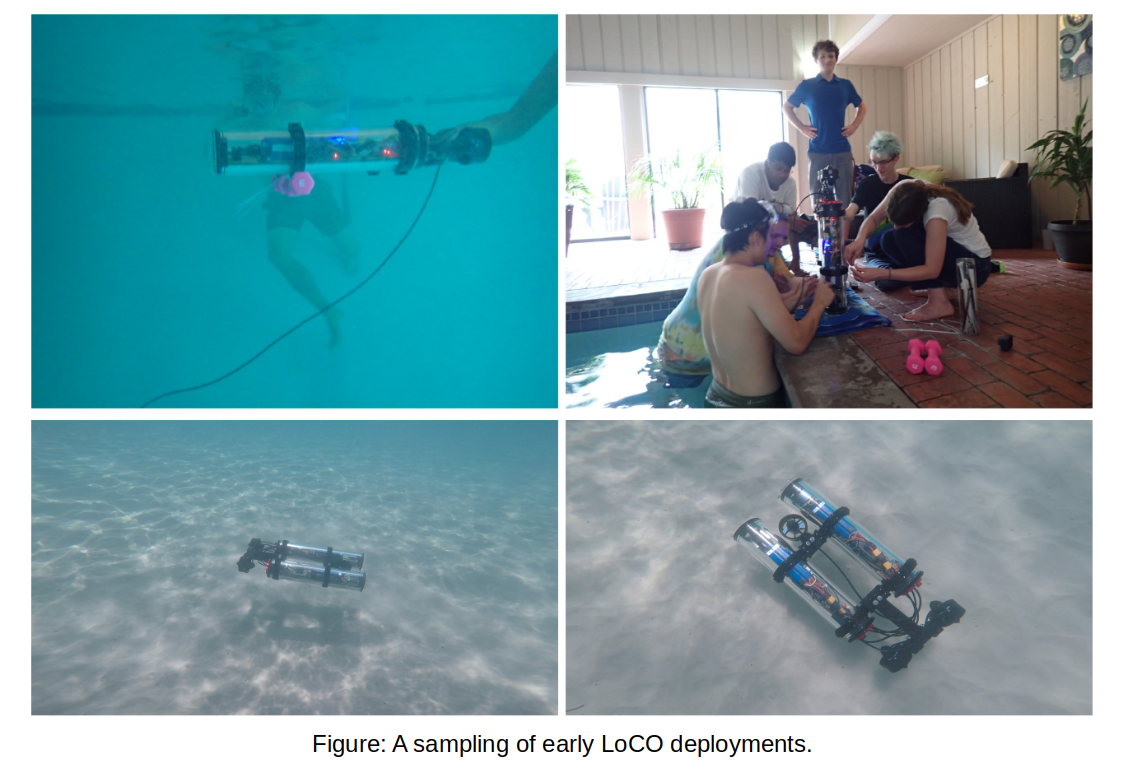
Gazebo Simulation: Deployments:
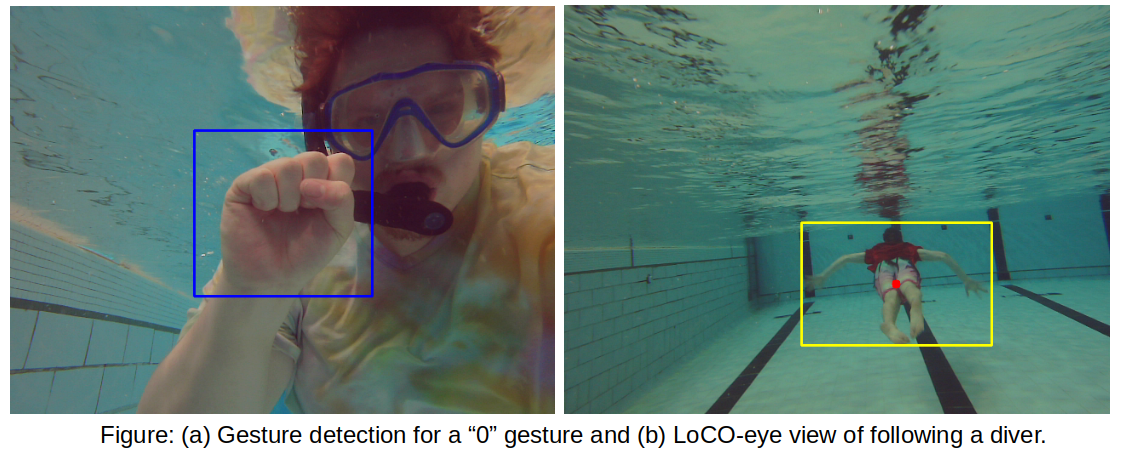
HRI capabilities:
Find more details about the system, instructions on assembly, software, human-robot interaction capabilities, deployment strategies in the paper.
Project page: https://loco-auv.github.io/
Paper: https://arxiv.org/abs/2003.09041